
Mission
Automotive radar is fast growing areas of consumer interest. This gives rise to a challenge to a well-working radar systems in handling the fixed to mobile and mobile to mobile radar channel. The two most important components influencing the channel characteristics are the antennas and the fast-changing environment, resulting in a time- variant behavior of the channel. Therefore, finding the actual physical wave propagation process is very important. A possible solution is the employment of measurement campaigns, but they are expensive, time-consuming, and provide no repeatability. An alternative approach is based on simulations.
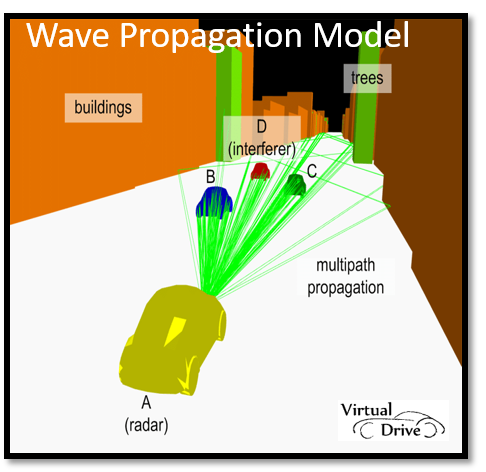
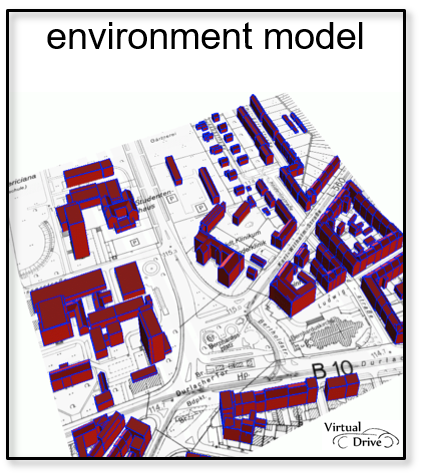
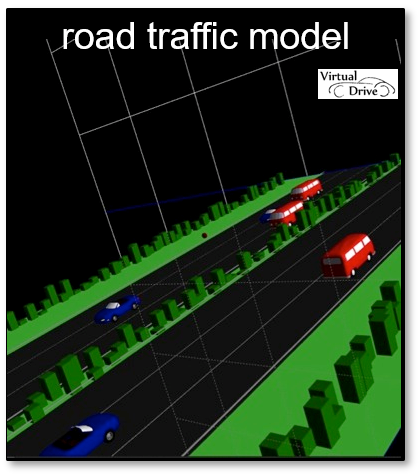
Institute of Radio Frequency Engineering and Electronics (IHE) has a tool for these popups which it is called “Virtual Autonomous Drive”, consists of an environment and a traffic model and calculates the multipath propagation with a 3D ray-tracing tool. These combinations yield a “Virtual Drive” through arbitrary scenarios for radar sensors and allows for the investigation of propagation environment.
Some interesting scenarios are defined in IHE and they have simulated by “Virtual Autonomous Drive”. These calculated scenarios are made available on this website to registered users. For registration please contact to: sevda.abadpour∂kit.edu
Terms and Conditions
Institute of Radio Frequency Engineering and Electronics (IHE) should be acknowledged and http://www.ihe.kit.edu/virtualautonomousdrive should be referred in case of republishing contents of “Virtual Autonomous Drive”.
Reference Projects
- MOre Safety for All by Radar Interference Mitigation (MOSARIM)
- Systemvalidierung von Fahrzeugradaren für auto-Mobile over-the-air (SafeMove)
- Interferenzminimierung durch Kooperation bei Radarsensoren (IMIKO RADAR)