
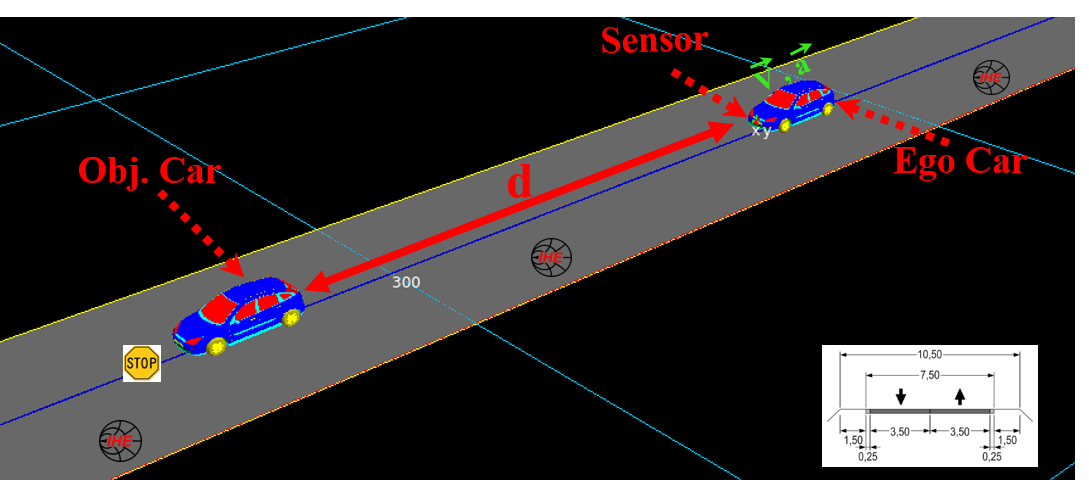
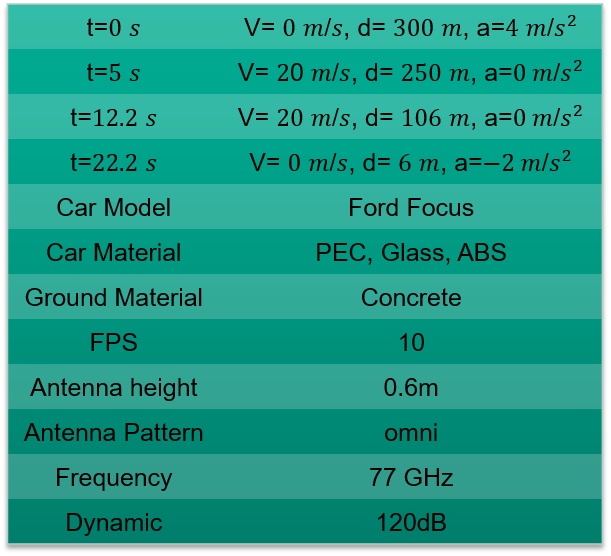
Approach to a stationary object
The Ego car is on the same lane as object car and it stops behind the vehicle object:
Ego Car: the car which is equipted by radar sensor
Obj. Car: Object car is the car which is influenced by sensor
Simulation reults:
Graphical result for path representation
{kind=link}
Power Delay Profile (PDP), Doppler Spectrum
{kind=link}
{kind=link}
Raw Data (Output of IHE_raytracer)
For downloading the simulation result, please contact: sevda.abadpour∂kit.edu